gRPC
gRPC is a modern, open-source, high-performance Remote Procedure Call (RPC) framework that can run in any environment. In SR OS, this framework is used to implement the gRPC server, which can then be used for configuration management or telemetry.
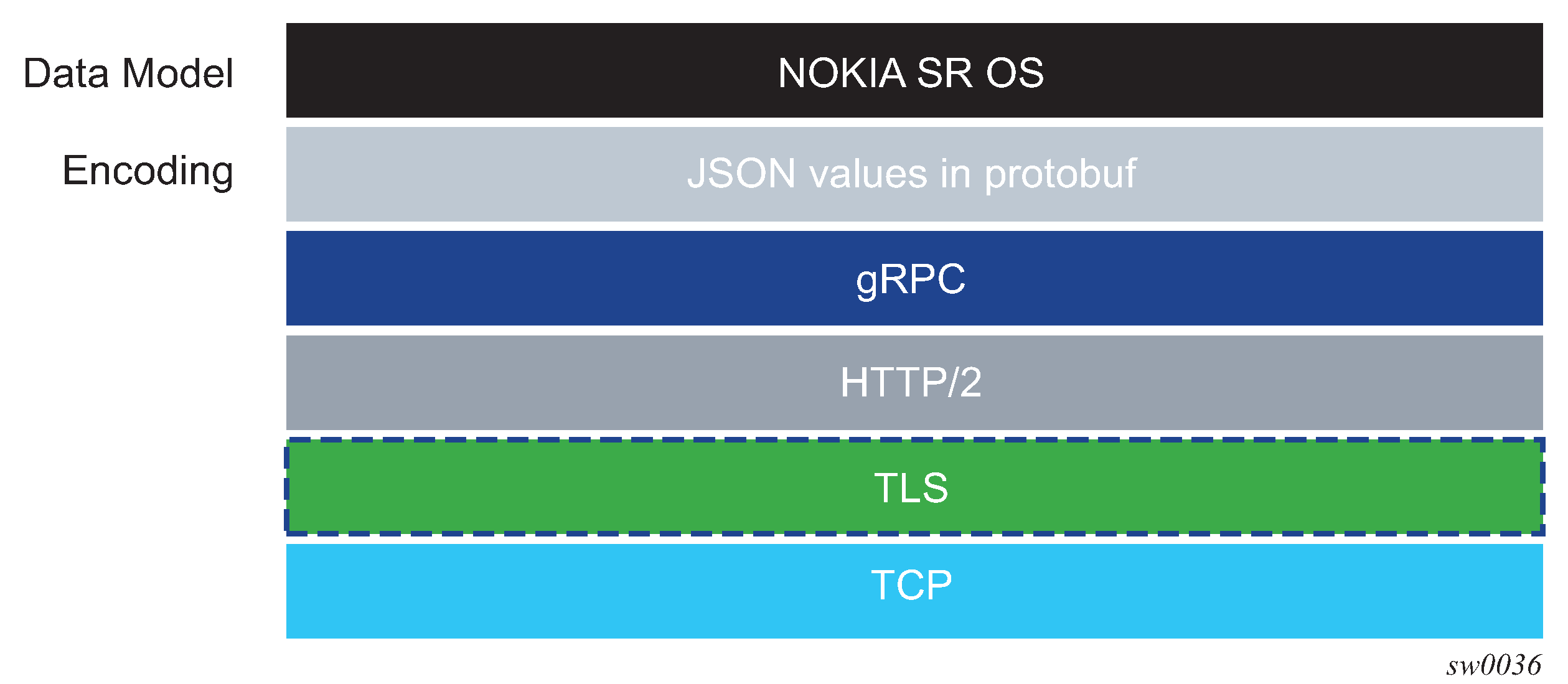
The gRPC transport service uses HTTP/2 bidirectional streaming between the gRPC client (the data collector) and the gRPC server (the SR OS device). A gRPC session is a single connection from the gRPC client to the gRPC server over a TCP or TLS port.
The gRPC service runs on port 57400 by default in SR OS. Use the following command to configure the TCP listening port, if required.
configure system grpc listening-port-
There is a maximum of eight concurrent gRPC sessions for all of the gRPC clients.
-
There is a maximum of 225 concurrent gRPC channels for all of the gRPC clients.
The following figure shows the gRPC protocol stack.
Security aspects
This section describes the security aspects associated with gRPC.
TLS-based encryption
The gRPC server on the SR OS can operate in the following modes:
-
without TLS encryption
-
with TLS encryption
The following command using the crl-optional command option makes configuration of a valid CRL in a ca-profile optional. However, from a security point of view, it is important to always verify the revocation status of a certificate.
configure system security pki ca-profile revocation-check crl-optionalBefore a gRPC connection comes up without TLS, the following conditions must be met:
-
no TLS server profile is assigned to the gRPC server
-
the following command is configured
configure system grpc allow-unsecure-connection
The following summarizes the process of encryption:
-
The gRPC session must be in an encrypted state.
-
If the gRPC client and server are unable to negotiate an encrypted gRPC session, the gRPC session fails and the gRPC server sends an error.
-
Fallback from an encrypted to an unencrypted gRPC session is not allowed.
For information about how to configure TLS with gRPC, see the TLS chapter.
Certificate revocation check with TLS
For TLS, the following command option is supported for a Certificate Authority (CA) certificate:
configure system security pki ca-profile revocation-check crl-optionalThe optional configuration can be extended for end entity (EE) certificates by using the following command (the default value is revoked). This command applies when the revocation status of a certificate cannot be determined because of an invalid CRL. A CRL can be invalid because it is missing, expired, or corrupted.
configure system security tls client-tls-profile status-verify default-resultThe status-verify command allows users to override the recommended revocation check policy, when applicable.
See Certificate revocation check for more information.
Authentication
The gRPC users can be authenticated using the local user database, RADIUS, or TACACS+.
When using the local user database, the access grpc statement must be included in the user configuration.
- RADIUS
Use the following commands to configure the access grpc statement and ensure that radius use-default-template is enabled (or the RADIUS server must send the Timetra-Access VSA with a value that includes gRPC access):
- MD-CLI
configure system security aaa user-template user-template-name radius-default configure system security aaa user-template access grpc true configure system security aaa remote-servers radius use-default-template - classic
CLI
configure system security user-template radius_default configure system security user-template access grpc configure system security radius use-default-template
- MD-CLI
- TACACS+
Use the following commands to configure the access grpc statement and ensure that tacplus use-default-template is enabled:
- MD-CLI
configure system security aaa user-template user-template-name tacplus-default configure system security aaa user-template access grpc true configure system security aaa remote-servers tacplus use-default-template - classic
CLI
configure system security user-template tacplus_default configure system security user-template access grpc configure system security tacplus use-default-template
- MD-CLI
User authentication is based on following principles:
Each RPC sent by the gRPC client carries a username and password.
For the first RPC in the gRPC session, the gRPC server tries to authenticate the user using the specified authentication order, such as using the local user database, RADIUS, or TACACS+.
For example, if TACACS+ is first in the authentication order, the gRPC server sends a request to the TACACS+ server to authenticate the gRPC user.
For the subsequent RPCs on that same authenticated gRPC session, the username and password are re-authenticated only if changed.
When no username and password are provided with the RPC, the gRPC server returns an error.
If the RPC user is changed, any active subscriber RPCs on that same gRPC session are terminated by the gRPC server.
If the RPC password is changed, the active gRPC session continues to exist until a different username and password is sent in a subsequent RPC, or the gRPC session is terminated.
Each message is carried over a gRPC session that was previously encrypted; the session is not re-encrypted.
SR OS device authentication is based on the following principles:
-
The gRPC clients do not share gRPC sessions. Each gRPC client starts a separate gRPC session.
-
When a gRPC session is established, the gRPC server certificates are verified by the gRPC client to ensure that every gRPC server is authenticated by the gRPC client.
-
If gRPC is shut down on the gRPC server and a gRPC client is trying to establish a gRPC session, the gRPC client gets an error for every RPC sent.
-
If gRPC is shut down on the gRPC server and a gRPC session is established, all active RPCs are gracefully terminated and an error is returned for every active RPC.
gNMI service
The gRPC Network Management Interface (gNMI) is a gRPC based protocol for network management functions, such as changing the configuration of network elements and retrieving state information. In addition, gNMI provides functionality necessary for supporting telemetry. The gNMI service is specified in the OpenConfig forum.
gNMI service definitions
The SR OS gRPC server supports gNMI version 0.7.0, and, in particular, the following RPC operations:
Capability RPC
Get/Set RPC
Subscribe RPC
Publish RPC
As in NETCONF RPCs, gNMI RPCs that are sent to the SR OS system are logged in security log and they are marked as authorized or unauthorized, and include information such as username, time, RPC type, and IP address of the client.
Capability discovery
In gNMI service, the client discovers the capabilities of the gRPC server through a Capability-Discovery RPC, which consists of ‟CapabilityRequest” and ‟CapabilityResponse” messages.
During this message exchange, the gRPC server informs the client about following attributes:
-
supported gNMI version
-
supported models
-
supported encodings
The SR OS server announces the supported models based on the configuration in the following context.
configure system management-interface yang-modulesThe supported models includes the Nokia YANG or OpenConfig (OC) models.
The advertised module names and organizations are as follows:
-
nokia-conf, org = "Nokia"
-
nokia-state, org = "Nokia"
-
openconfig, org = "OpenConfig working group" (as specified by the 'organization' in the YANG models)
-
version - the version number is be defined as follows:
-
for Nokia YANG models, the version number corresponds to an SR OS release number, for example, "16.0.R1"
-
for OC YANG models, the version number corresponds to a version number defined in "oc-ext:openconfig-version" that is included in the respective YANG models
-
for OC-YANG models, including Nokia deviations, the version number corresponds to an SR OS release number, for example, "16.0.R1"
-
The following is an example of a ‟Capabilities Response Message”:
Going to send message of type gnmi.CapabilityResponse:
.gnmi_version: 0.4.0
.supported_encodings (1):
.encoding: 0 = JSON
.supported_models (47):
{ .name: 'nokia-conf', .organization: 'Nokia', .version: '16.0.R1' }
{ .name: 'nokia-state', .organization: 'Nokia', .version: '16.0.R1' }
{ .name: 'openconfig-
bgp', .organization: 'OpenConfig working group', .version: '4.0.1' }
<snip>
{ .name: 'nokia-sr-openconfig-if-ethernet-deviations', .organization: 'Nokia',
.version: '16.0.R1' }
{ .name: 'nokia-sr-openconfig-if[[-ip-deviations', .organization: 'Nokia',
.version: '16.0.R1'..."
Get/Set RPC
Information is retrieved from the NE using GET RPC messages, which consist of ‟GetRequest” and ‟GetResponse” messages. The client asks for information by specifying the following:
a set of paths
All rules to a path definition apply, as specified in the gNMI specification.
type
Consists of configuration, state, or operational data.
encoding
This is in accordance with the server advertisement during capability discovery.
use_models
This message is ignored.
There is an upper limit on the size of the ‟GetResponse” message. This limit cannot exceed 100 MB. If the limit is exceeded, the SR OS gRPC server responds with an error message.
To modify the information in an NE element, a SET gRPC message is used. This gRPC supports three types of transactions:
delete
replace
update
With a gNMI SET RPC, SR OS authorizes all configuration changes; that is, it checks the YANG tree and authorizes every changed element.
The deletion of a container results in the deletion of any children containers that are authorized for deletion, as well as their contents. Children containers that are not authorized for deletion, as well as their contents, are retained. For example, upon deletion of configure system, configure system security is not deleted because the deletion of that child container is not authorized.
A ‟no change” for a value does not require authorization. Therefore, it is possible to execute a non-authorized command if there is no change in value.
For example, when a user is not authorized to change access li, but attempts to change it for another user who already has access li, SR OS allows that action because there is no change in value.
Subscribe RPC
The subscribe RPC is part of the telemetry support in gNMI.
The gRPC client initiates a subscription by sending a subscribe RPC that contains a "SubscribeRequest" message to the gRPC server. A prefix can be specified in the "SubscribeRequest". If a prefix is present, it is appended to the start of every path to provide a full path.
A subscription contains the following:
a list of one or more paths with the following conditions:
A path represents the data tree as a series of repeated strings and elements. Each element represents a data tree node name and its associated attributes.
A path must be syntactically valid within the set of schema modules that the gRPC server supports.
The path list cannot be modified during the lifetime of the subscription.
If the subscription path is to a container node, all child leafs of that container node are subscribed to.
Any specified path must be unique within the list; paths cannot be repeated within the list. An error is returned if the same path is used more than once in a single subscription.
A specified path does not need to pre-exist within the current data tree on the gRPC server. If a path does not exist, the gRPC server continues to monitor for the existence of the path. Assuming that the path exists, the gRPC server transmits telemetry updates.
The gRPC server does not send data for a non-existent path; for example, if a path is non-existent at the time of subscription creation or if the path was deleted after the subscription was established.
- The maximum number of paths for all subscriptions is 14400. A path using a wildcard is considered a single path.
- an encoding with the following supported options:
- JSON
- JSON-IETF
- BYTES
- PROTO
configure system grpc gnmi proto-versionIf the command option is latest, the encodings are interpreted as defined in specification v0.8.0. The following table lists the summary of different encoding options and the values used based on the proto-version command for all possible values defined in the gnmi.proto OpenConfig module.
Table 1. Options for the proto-version command response field JSON JSON-IETF PROTO BYTES string string_val = 1; latest v0.7.0 int64 int_val = 2; latest v0.7.0 uint64 uint_val = 3; latest v0.7.0 bool bool_val = 4; latest v0.7.0 bytes bytes_val = 5; latest v0.7.0 float float_val=6 [deprecated=true]; // Deprecated - use double_val. Decimal64 decimal_val = 7 [deprecated=true]; // Deprecated - use double_val. v0.7.0 ScalarArray leaflist_val = 8; latest google.protobuf.Any any_val = 9; bytes json_val = 10; x bytes json_ietf_val = 11; x string ascii_val = 12; bytes proto_bytes = 13; v0.7.0 latest double double_val=14; latest a subscription mode of one of the following types:
ONCE mode
The server returns only one notification containing all the information to which the client has subscribed. In general, use telemetry to retrieve large amounts of information from the NE: ‟SubscribeRequest” message with ONCE subscription type.
ON_CHANGE mode
The server returns notifications only when the value of the subscribed field changes. See ON_CHANGE subscription mode for more information.
SAMPLE mode
The gRPC server sends notifications at the specified sampling interval.
TARGET_DEFINED mode
This type means ON_CHANGE for all states that support ON_CHANGE notifications and SAMPLE mode for all other objects in the YANG tree.
- a sample interval for each path:
- If a sample interval of less than 1 s is specified, the gRPC server returns an error.
- If the sample interval is set to 0, the default value of 10 s is used.
- A sample interval is specified in nanoseconds (10 000 000 000 by default).
When a subscription is successfully initiated on the gRPC server, ‟SubscribeResponse” messages are sent from the gRPC server to the gRPC client. The ‟SubscribeResponse” message contains update notifications about the subscription path list.
An update notification contains the following:
a timestamp of the statistics collection time, in nanoseconds
a prefix
If a prefix is present, it is logically appended to the start of every path to provide the full path.
-
The presence of a prefix in the ‟SubscribeResponse” message is not related to the presence of a prefix in the original ‟SubscribeRequest” message. The prefix in the ‟SubscribeResponse” message is optimized by the gRPC server.
a list of updates (path and value pairs)
A path represents the data tree path as a series of repeated strings or elements, where each element represents a data tree node name and its associated attributes. See Schema paths for more information.
The ‟TypedValue” message represents the value of the data tree node, where the encoding is ‟JSON”, ‟JSON_IETF”, ‟Bytes, or ‟Protobuf” depending on the information in the ‟SubscribeRequest” message.
Multiple notification messages can be combined in a single ‟SubscribeResponse” message. This bundling minimizes overhead, which improves the efficiency of telemetry data transport, however, this may delay some notifications and timestamps may be less accurate. The following commands control message bundling:
max-time-granularity
This parameter controls the maximum time during which notifications can be bundled.
max-msg-count
This parameter controls the maximum number of notifications that can be bundled.
A synchronization response notification is sent once, after the gRPC server sends all updates for the subscribed-to paths. The synchronization response must be set to ‟true” for the gRPC client to consider that the stream has synced one time. A sync response is used to signal the gRPC client that it has a full view of the subscribed-to data.
The gRPC server sends an error, if required. The error contains a description of the problem.
- MD-CLI
configure system security aaa management-interface output-authorization telemetry-data - classic
CLI
configure system security management-interface output-authorization telemetry-data
PROTO encoding
PROTO encoding is performed by the gRPC server, which encodes the values of the leafs as typed values. The following table lists the mapping of the individual YANG types to the typed values defined in the gNMI specification (v0.8.0) in the GitHub repository.
| YANG type | Typed value |
|---|---|
binary |
bytes_val |
bits |
string_val |
boolean |
bool_val |
decimal64 |
double_val |
empty |
bool_val |
enumeration |
string_val |
identityref |
string_val |
instance-identifier |
string_val |
int8 |
int_val |
int16 |
int_val |
int32 |
int_val |
int64 |
int_val |
leafref |
type of referenced leaf |
string |
string_val |
uint8 |
uint_val |
uint16 |
uint_val |
uint32 |
uint_val |
uint64 |
uint_val |
union |
type of active union member |
BYTES encoding
The BYTES encoding mechanism uses the binary encoding format for both path and value to increase the efficiency of telemetry data transfer. The YANG files are encoded in protobuf format, in which every possible path is encoded as a binary index.
The protobuf encoded YANG files are distributed together with the SR OS software or found on https://github.com under Nokia 7X50_protobufs. The PROTO definitions of the YANG model are specifically generated for each software release; backward compatibility is not supported.
To retrieve decoding information for PROTO encoding, the gNMI client can use GetRPC to request a path with origin "gnmi.schemas". The path must be either a root path "gnmi.schemas:/", or a specific path, for example, "gnmi.schemas:/protobuf-typemap", as described in protobuf-vals.md published on github.com (May 2018).
The following example shows the GetRPC request and SR OS response:
Received message of type gnmi.GetRequest:
.type: 0 = ALL
.encoding: 4 = JSON_IETF
.prefix: /
.path (1):
.path: gnmi.schemas:/
"
Going to send message of type gnmi.GetResponse:
.notification (1):
.timestamp: 1616677860728392525
.update (1):
.path: gnmi.schemas:/protobuf-typemap
.val.value = json_ietf_val: {
"gnmi-protobuf-encoding:origin": [
{
"name": "",
"container": [
{
"path": "/",
"message-name": "proto.nokia.net/Nokia.SROS.root"
}
]
}ON_CHANGE subscription mode
The SR OS supports ON_CHANGE subscription mode. This subscription mode indicates that notification messages are sent as follows:
after the ‟SubscriptionRequest” message is received
every time the corresponding leaf value is changed
The notification message, as a response to an ON_CHANGE subscription, always contains the new value of the corresponding leaf, as defined in the gNMI specification.
The ON_CHANGE subscription is supported for all configuration leafs as well as for selected state leafs. Use the following command to display all state leafs supporting the ON_CHANGE subscription.
tools dump system telemetry on-change-pathsON_CHANGE subscription is accepted for all valid paths. The server sends ON_CHANGE notifications only for leafs within the specified subtree that support ON_CHANGE notifications.
Publish RPC
With dial-out telemetry, where the SR OS node is the gRPC client instead of the gRPC server, the SR OS node sends a Publish RPC with a ‟SubscribeResponse” message to the gRPC server. See Dial-out telemetry for more information.
Because the current gnmi.proto definition does not support dial-out mode, a protobuf definition is introduced, with a separate gRPC service, as follows:
NOKIA-DialOut.proto
option (dialout_service) = 0.1.0
service gMIDialOut {
rpc Publish(stream SubscribeResponse) returns (stream PublishResponse)
}
message PublishResponse {
}The preceding proto file definition reuses the ‟SubscribeResponse” message defined for dial-in telemetry, in accordance with the gNMI specification.
Schema paths
Telemetry subscriptions include a set of schema paths to identify which data nodes are of interest to the collector.
The paths in Telemetry Subscribe RPC requests follow the basic conventions described in the OpenConfig gnmi-path-conventions.md published on github.com (version 0.4.0, published June 21, 2017).
A path consists of a set of path segments, often shown with a ‟/” character as a delimiter.
/configure/router[router-name=Base]/interface[interface-name=my-interface1]/descriptionThese paths are encoded as a set of individual string segments in gnmi.proto (without any ‟/” characters).
["configure", "router[router-name=Base]", "interface[interface-name=my-interface1]", "description"]A path selects an entire subtree of the data model and includes all descendants of the node indicated in the path. The following table describes the types of schema paths that are supported in SR OS telemetry.
| Path example | Description |
|---|---|
|
/configure/router[router-name=Base]/interface[interface-name=abc] |
Selects all config leafs of interface abc and all descendants |
|
/configure/router[router-name=Base]/interface[interface-name=abc]/description |
Selects only the description leaf of interface abc |
|
/state/router[router-name=Base]/interface[interface-name=*] |
Selects all state information for all base router interfaces using a wildcard in a single segment of a path |
|
/configure/router[router-name=Base]/interface[interface-name=*]/description |
Selects all state information for all base router interfaces using a wildcard in a single segment of a path |
|
/configure/router[router-name=Base]/interface/description |
Applies to all RPCs. Selects the entire list to account for absent list keys. It is equivalent to /configure/router[router-name=Base]/interface[interface-name=*]/description |
|
/ |
The root path. This selects all config and state data from all models (in all namespaces) supported on the router. Encoded as ‟” in gRPC/gPB. |
|
/state/... |
Not supported. Equivalent to /state/ |
|
/* |
Expands one level of a specified subtree schema. |
The following list describes telemetry paths that are supported in SR OS:
-
Wildcards in multiple segments of a path are supported.
For example: /state/card[slot-number=*]/mda[mda-slot=*]
-
The following wildcards are supported in the schema.
-
Specifying ‟/…” wildcard expands to multiple element levels in a path.
-
Specifying ‟/*” wildcard expands to only one level in a path.
-
-
Wildcards for entire path segments are supported as follows:
-
For example: ‟/state/card/.../oper-state” expands to following paths
/state/card[slot-number=*]/hardware-data/oper-state
/state/card[slot-number=*]/mda[mda-slot=*]/hardware-data/oper-state
/state/card[slot-number=*]/mda[mda-slot=*]/flex[group-index=*]/oper-state
-
For example: ‟/state/card/*/oper-state” expands to following path
/state/card[slot-number=*]/hardware-data/oper-state
-
-
The paths with wildcards are expanded when a subscription is activated; this applies to dynamic and persistent subscriptions. In some cases, it is possible that a single path with wildcards can be expanded across both Nokia and Openconfig YANG models. However, this occurs only if both model types are enabled. If only one type is enabled, the path is expanded only within the enabled model. If the other type is enabled later, it is necessary to reset all subscriptions, which ensures that the expansion includes the newly enabled model type.
The following list describes telemetry paths that are not supported in SR OS.
-
If a wildcard is used for any key of a list, a wildcard must be used for all the keys of that list. In a single path segment, all keys must either have specific values, or all keys must have wildcards. A mix of wildcards and specific values for different parts of a list key is not supported.
For example:
Supported:
/a/b[key1=*][key2=*]/c[key1=foo]
/a/b[key1=foo][key2=bar]/c[key1=*]
Not supported:
/a/b[key1=foo][key2=*]
-
Functions such as ‟current()” and ‟last()”, and mathematical operators, such as stat<5 or octets>3 are not supported in paths. The ‟|” (OR operator, used to select multiple paths) is not supported.
gNMI service use cases
The gNMI service can be used for the following:
Telemetry
NE Configuration Management
Telemetry
Telemetry is a network monitoring and fault management framework. Telemetry is driven by the need to use fresh data obtained from the network to make fast networking decisions, such as traffic optimization and preventive troubleshooting.
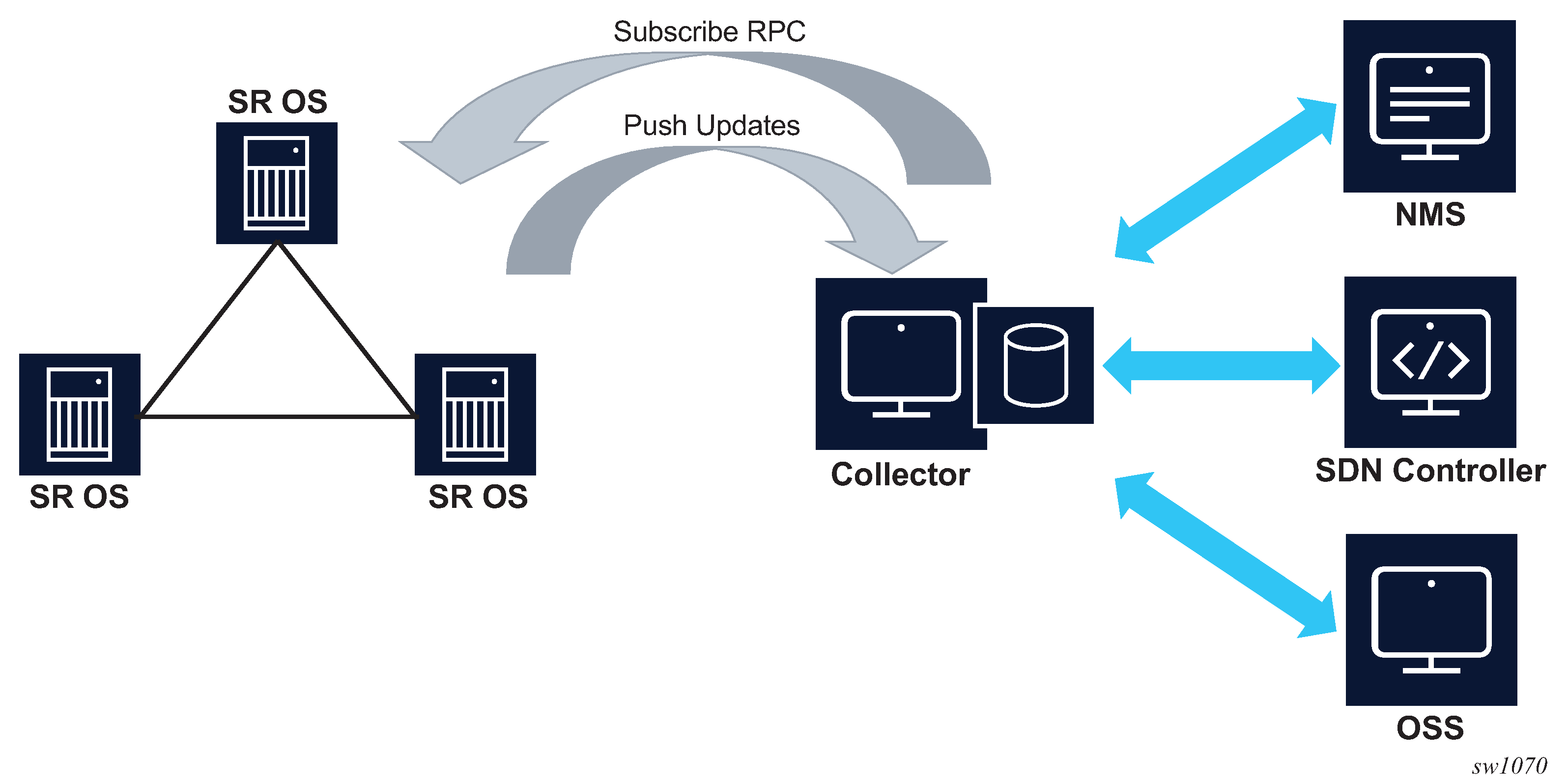
Dial-in telemetry
When the data collector initiates the gRPC connection, the SR OS node assumes the role of the gRPC server and the collector is the client. This is referred to as dial-in telemetry, where the SR OS node pushes data to the receiver (collector). The following figure shows the telemetry session initiated from the collector to the SR OS node via the Subscribe RPC.
Dynamic subscriptions
Dynamic subscriptions are created by the collector using the Subscribe RPC. These subscriptions are removed as soon as the gRPC session terminates. Dynamic subscriptions are currently supported only in dial-in mode.
Dial-in telemetry examples
This section contains examples of telemetry subscription requests and responses. The following examples are dumps of protobuf messages from a Python API. Formats may vary across different implementations.
Subscribe to a single path
2017-06-05 17:06:13,189 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=test]"
element: "statistics"
element: "ip"
element: "in-packets"
}
mode: SAMPLE
sample_interval: 10000000000
}
}
2017-06-05 17:06:13,190 - RCVD::SubsribeResponse
2017-06-05 17:06:23,492 - RCVD::Subscribe
2017-06-05 17:06:23,492 - update {
timestamp: 1496675183491595139
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=test]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:06:23,494 - RCVD::Subscribe
2017-06-05 17:06:23,494 - sync_response: true
2017-06-05 17:06:33,589 - RCVD::Subscribe
2017-06-05 17:06:33,589 - update {
timestamp: 1496675213491595139
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=test]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟28””
}
}
....
....
Subscribe to a single path with wildcard
2017-06-05 17:08:29,055 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=*]"
element: "statistics"
element: "ip"
element: "in-packets"
}
mode: SAMPLE
sample_interval: 30000000000
}
}
2017-06-05 17:08:29,056 - RCVD::SubsribeResponse
2017-06-05 17:08:59,133 - RCVD::Subscribe
2017-06-05 17:08:59,133 - update {
timestamp: 1496675339132056575
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=system]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:08:59,135 - RCVD::Subscribe
2017-06-05 17:08:59,135 - update {
timestamp: 1496675339133006678
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:08:59,135 - RCVD::Subscribe
2017-06-05 17:08:59,135 - update {
timestamp: 1496675339133006678
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_D]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:08:59,136 - RCVD::Subscribe
2017-06-05 17:08:59,136 - sync_response: true
2017-06-0517:09:29,139 - RCVD::Subscribe
2017-06-0517:09:29,139 - update {
timestamp: 1496682569121314
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=system]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:09:29,142 - RCVD::Subscribe
2017-06-05 17:09:29,142 - update {
timestamp: 1496682569124342
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
2017-06-05 17:09:29,145 - RCVD::Subscribe
2017-06-05 17:09:29,145 - update {
timestamp: 1496682569127344
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_D]"
element: "statistics"
element: "ip"
}
update {
path {
element: "in-packets"
}
val {
json_val: ‟‟0””
}
}
}
....
....
Subscribe to more than one path
2017-01-24 12:54:18,228 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
}
mode: SAMPLE
sample_interval: 30000000000
}
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "mpls"
element: "statistics"
element: "lsp-egress-stats[lsp-name=lsp_to_dest_f]"
}
mode: SAMPLE
sample_interval: 30000000000
}
}
Subscribe to a list with wildcard
2017-01-24 13:45:30,947 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=*]"
}
mode: SAMPLE
sample_interval: 30000000000
}
}
Subscribe to path where the object did not exist before subscription
2017-01-24 13:53:50,165 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
}
mode: SAMPLE
sample_interval: 30000000000
}
}
2017-01-24 13:53:50,166 - RCVD::SubsribeResponse
2017-01-24 13:54:20,169 - RCVD::Subscribe
2017-01-24 13:54:20,169 - sync_response: true
2017-01-24 13:54:50,174 - RCVD::Subscribe
2017-01-24 13:54:50,174 - update {
timestamp: 1485262490169309451
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
}
update {
...
...
}
}
Subscribe to a path where the object existed before subscription and was then deleted after subscription
2017-01-24 14:00:41,292 - SENT::SubscribeRequest
subscribe {
subscription {
path {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
}
mode: SAMPLE
sample_interval: 30000000000
}
}
2017-01-24 14:00:41,294 - RCVD::SubsribeResponse
2017-01-24 14:01:11,295 - RCVD::Subscribe
2017-01-24 14:01:11,295 - update {
timestamp: 1485262871290064704
prefix {
element: "state"
element: "router[router-instance=Base]"
element: "interface[interface-name=to_node_B]"
}
update {
...
...
}
}
2017-01-24 14:01:11,359 - RCVD::Subscribe
2017-01-24 14:01:11,359 - sync_response: true
2017-01-24 14:01:41,293 - RCVD::Subscribe
2017-01-24 14:02:11,296 - RCVD::Subscribe
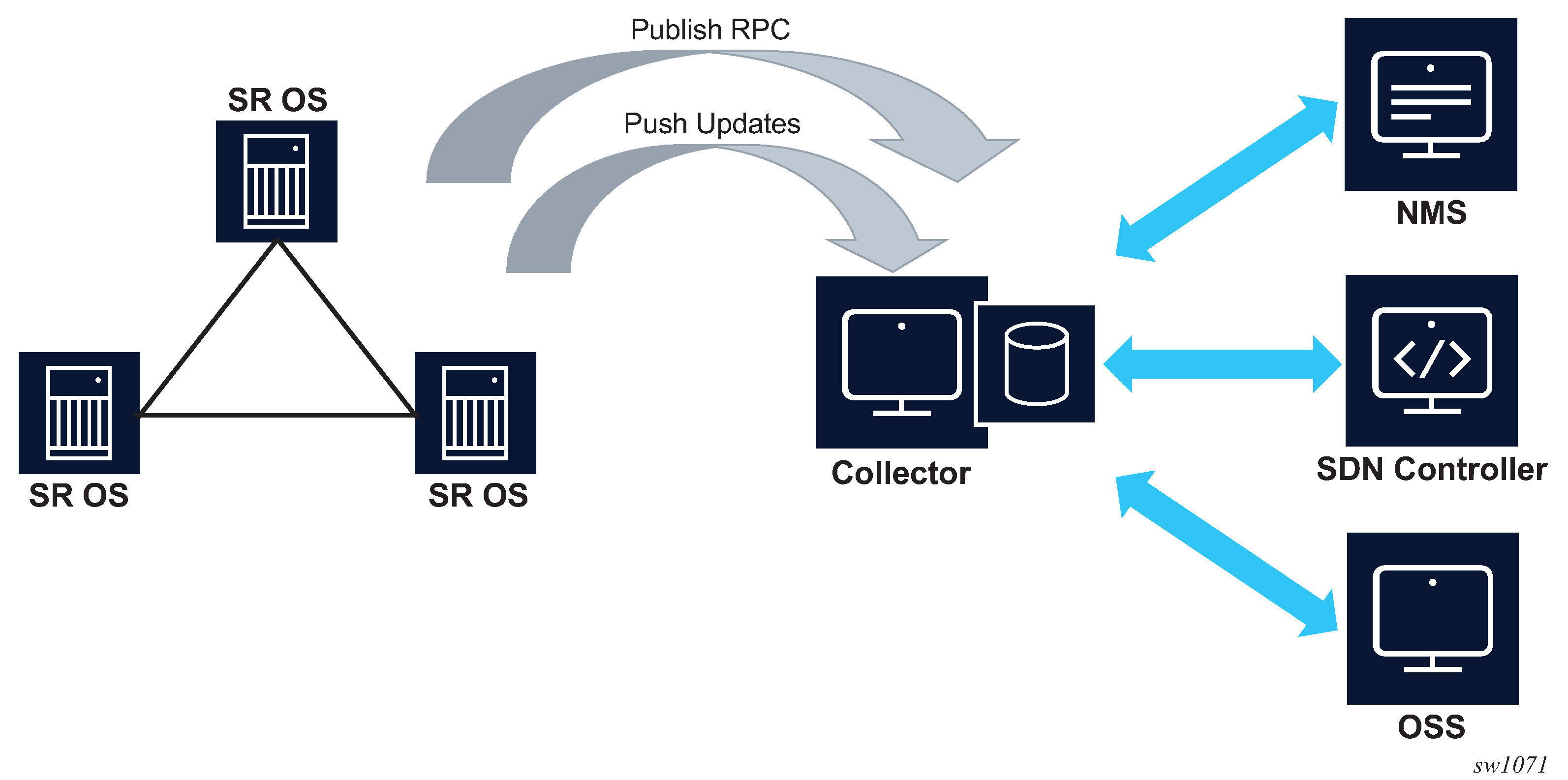
Dial-out telemetry
When the SR OS node initiates the gRPC connection, the SR OS node assumes the role of the gRPC client. This is referred to as dial-out telemetry. The following figure shows the telemetry session initiated from the SR OS node to the collector via a Publish RPC.
Persistent subscriptions
Persistent subscriptions are configured on the SR OS node and they are not cleared when the gRPC session terminates. Persistent subscriptions are supported only in dial-out mode.
A persistent subscription associates one or more paths with corresponding destinations via sensor groups.
Every subscription has an associated administrative state as well as an operational state. If a connection is lost, the operational state goes down. If the collector does not receive the data but the SR OS appears to have a connection and the subscription is up, the connection can be reset by setting the administrative state down and then back up.
Destinations are defined in the form of destination groups. A destination group supports up to four destinations, where the destinations are served in a round-robin fashion. SR OS attempts to connect the first destination, and if successful, the telemetry data is sent to that destination. If the connection to the first destination fails (initially or during operation), SR OS attempts to connect or reconnect to the second destination, if it is configured. All configured destinations and local addresses should be reachable in the specified routing instances.
When the SR OS node initiates the gRPC connection via the Publish RPC, it includes the subscription name and the configured system name in the metadata. The collector can use this information to associate individual notification messages with the node and subscription.
Modifying any parameter of the active subscription causes the SR OS node to close the gRPC connection before attempting a reconnection.
When a gRPC connection is lost, the SR OS node continually attempts to establish a new session with the collector.
QoS marking
The QoS marking of the IP packets carrying notifications can be configured under persistent subscription. IP packets to a specified destination are marked according to the configuration of the first subscription opened to the destination. This DSCP marking is maintained, regardless of any configuration changes, as long as the dial-out connection to the specified destination is open. If the destination is disconnected for any reason, the DSCP marking must be redefined when the connection is reestablished.
Configuring dial-out telemetry
The dial-out telemetry configuration process includes the following elements:
sensor group
The sensor group specifies one or more schema paths from which data is streamed to the collector.
destination group
The destination group specifies the destination addresses (and ports) that the router uses to send the telemetry data.
persistent subscription
The persistent subscription associates a sensor group with a destination group and specifies streaming parameters for the telemetry data. For example, the subscription mode can be specified (ON_CHANGE, SAMPLE, or TARGET_DEFINED) for the subscription.
Dial-out telemetry can be configured via the MD-CLI or the classic CLI. For more information about using the MD-CLI, see the 7450 ESS, 7750 SR, and 7950 XRS MD-CLI User Guide. For more information about the MD-CLI configuration commands, see the 7450 ESS, 7750 SR, 7950 XRS, and VSR MD-CLI Command Reference Guide.
For more information about the classic CLI configuration commands, see the 7450 ESS, 7750 SR, 7950 XRS, and VSR Classic CLI Command Reference Guide and the 7450 ESS, 7750 SR, 7950 XRS, and VSR Clear, Monitor, Show, and Tools CLI Command Reference Guide.
The following example shows a dial-out telemetry configuration.
MD-CLI
[ex:configure system telemetry]
A:admin@node-2# info
destination-group "quick_cfg_dg_1" {
description "Destination Group 1"
allow-unsecure-connection
destination 192.168.65.5 port 40001 {
router-instance "Base"
}
destination 192.168.65.5 port 40002 {
router-instance "Base"
}
}
persistent-subscriptions {
subscription "quick_cfg_sub_1" {
admin-state enable
description "Subscription 1"
sensor-group "quick_cfg_sg"
mode sample
sample-interval 1234
destination-group "quick_cfg_dg_1"
local-source-address 1.2.3.4
originated-qos-marking cp19
encoding bytes
}
}
sensor-groups {
sensor-group "quick_cfg_sg" {
description "Sensor Group"
path "/state/router[router-name=Base]/interface[interface-name=test]/
statistics/ip" {
}
}
}classic CLI
A:node-2>config>system>telemetry# info
----------------------------------------------
destination-group "quick_cfg_dg_1" create
description "Destination Group 1"
allow-unsecure-connection
tcp-keepalive
shutdown
exit
destination 192.168.65.6 port 40001 create
router-instance "Base"
exit
destination 192.168.65.5 port 40002 create
router-instance "Base"
exit
exit
sensor-groups
sensor-group "quick_cfg_sg" create
description "Sensor Group"
path "/state/router[router-name=Base]/interface[interface-name=test]/statistics/ip" create
exit
exit
exit
persistent-subscriptions
subscription "quick_cfg_sub_1" create
description "Subscription 1"
destination-group "quick_cfg_dg_1"
encoding bytes
mode sample
sample-interval 1234
sensor-group "quick_cfg_sg"
local-source-address 1.2.3.4
originated-qos-marking "cp19"
no shutdown
exit
exit
----------------------------------------------Use the following command to show the telemetry persistent subscription for "quick_cfg_sub_2".
show system telemetry persistent subscription "quick_cfg_sub_2"===============================================================================
Telemetry persistent subscription
===============================================================================
Subscription Name : quick_cfg_sub_2
Administrative State : Enabled
Operational State : Up
Subscription Id : 198
Description :
Sensor Group : quick_cfg_sg_2
Destination Group : quick_cfg_dg_2
Path Mode : sample
Sample Interval : 1000 ms
Encoding : bytes
===============================================================================
Use the following command to show the telemetry persistent subscription paths for "quick_cfg_sub_2".
show system telemetry persistent subscription "quick_cfg_sub_2" paths===============================================================================
Telemetry persistent subscriptionrsistent# subscription "quick_cfg_sub_2" paths
===============================================================================
Subscription Name : quick_cfg_sub_1nt# subscription "quick_cfg_sub_2" paths
Administrative State : Enabled
Operational State : Up
Subscription Id : 198
Description :
Sensor Group : quick_cfg_sg_2
Destination Group : quick_cfg_dg_2
Path Mode : sample
Sample Interval : 1000 ms
Encoding : bytes
-------------------------------------------------------------------------------
Paths
-------------------------------------------------------------------------------
Path : /state
Finished Samples : 178
Deferred Samples : 402
Total Collection Time : 405223 ms
Min Collection Time : 2021 ms
Avg Collection Time : 2276 ms
Max Collection Time : 2956 ms
-------------------------------------------------------------------------------
No. of paths : 1
===============================================================================Use the following command to show the telemetry persistent subscription destinations for "quick_cfg_sub_2".
show system telemetry persistent subscription "quick_cfg_sub_2" destinations===============================================================================
Telemetry persistent subscription
===============================================================================
Subscription Name : quick_cfg_sub_2
Administrative State : Enabled
Operational State : Up
Subscription Id : 198
Description :
Sensor Group : quick_cfg_sg_2
Destination Group : quick_cfg_dg_2
Path Mode : sample
Sample Interval : 1000 ms
Encoding : bytes
-------------------------------------------------------------------------------
Destinations
-------------------------------------------------------------------------------
Destination : 192.168.65.1
Port : 40001
Operational State : Down
Last Oper Down Reason : MINOR: TELEMETRY #2353: RPC refused by peer
Last Oper Change : 2020/04/06 21:19:29
Connection Attempts : 22
Notification Count : 0
Total Notification Co*: 2315653
-------------------------------------------------------------------------------
Destination : 192.168.65.1
Port : 40002
Operational State : Up
Last Oper Down Reason : MINOR: TELEMETRY #2356: Canceled by config change
Oper Router Instance : management
Last Oper Change : 2020/04/06 21:19:30
Connection Attempts : 22
Notification Count : 3783151
Total Notification Co*: 5034573
-------------------------------------------------------------------------------
No. of destinations : 2
* indicates that the corresponding row element may have been truncated.
===============================================================================
NE configuration management
The following figure shows NE configuration and information retrieval using the gNMI service.
In the context of gNMI, every SET RPC appears as an single commit operation, regardless of the number of paths included in the message. NOKIA and OC models are supported by gNMI GET or SET RPC.
The following are examples of the GET RPC and SET RPC commands, including the response messages from the gRPC server.
GET RPC command
gNMI_rpc - INFO - SENT::GetRequest GET140550212650064
path {
elem {
name: "configure"
}
elem {
name: "system"
}
elem {
name: "location"
}
}
type: CONFIG
2017-12-06 12:17:28,639 - gMI_rpc - INFO -
RCVD::GetResponse GET140550212650064
notification {
timestamp: 1512559048634751055
update {
path {
elem {
name: "configure"
}
elem {
name: "system"
}
elem {
name: "location"
}
}
val {
json_val: "zurich"
}
}
}SET RPC command
gNMI_rpc - DEBUG - SENT::SetRequest
prefix {
}
update {
path {
elem {
name: "configure"
}
elem {
name: "system"
}
}
val {
json_val: {"location": "zurich"}
}
}
gMI_rpc - DEBUG - RCVD::SetResponse
prefix {
}
response {
path {
elem {
name: "configure"
}
elem {
name: "system"
}
}
op: UPDATE
} gNOI services
The gRPC Network Operations Interface (gNOI) defines a set of gRPC-based micro-services for executing operational commands on network devices. This includes the gNOI CERT service, which provides certificate management. The individual RPCs and messages that perform the operations required for certificate management on the node are defined in the Git repository hosting service (GitHub).
Certificate management for TLS connections
This section describes the gNOI services certificates for managing secure Transport Layer Security (TLS) connections.
The SR OS supports the following RPCs for managing certificates for secure TLS connections:
RPC GetCertificates
RPC CanGenerateCSR
RPC Rotate
RPC Install
RPC RevokeCertificates
RPC GetCertificates
RPC GetCertificates provide information to the controller about all active certificates on the server (SR OS node). The following figure shows the message flow.
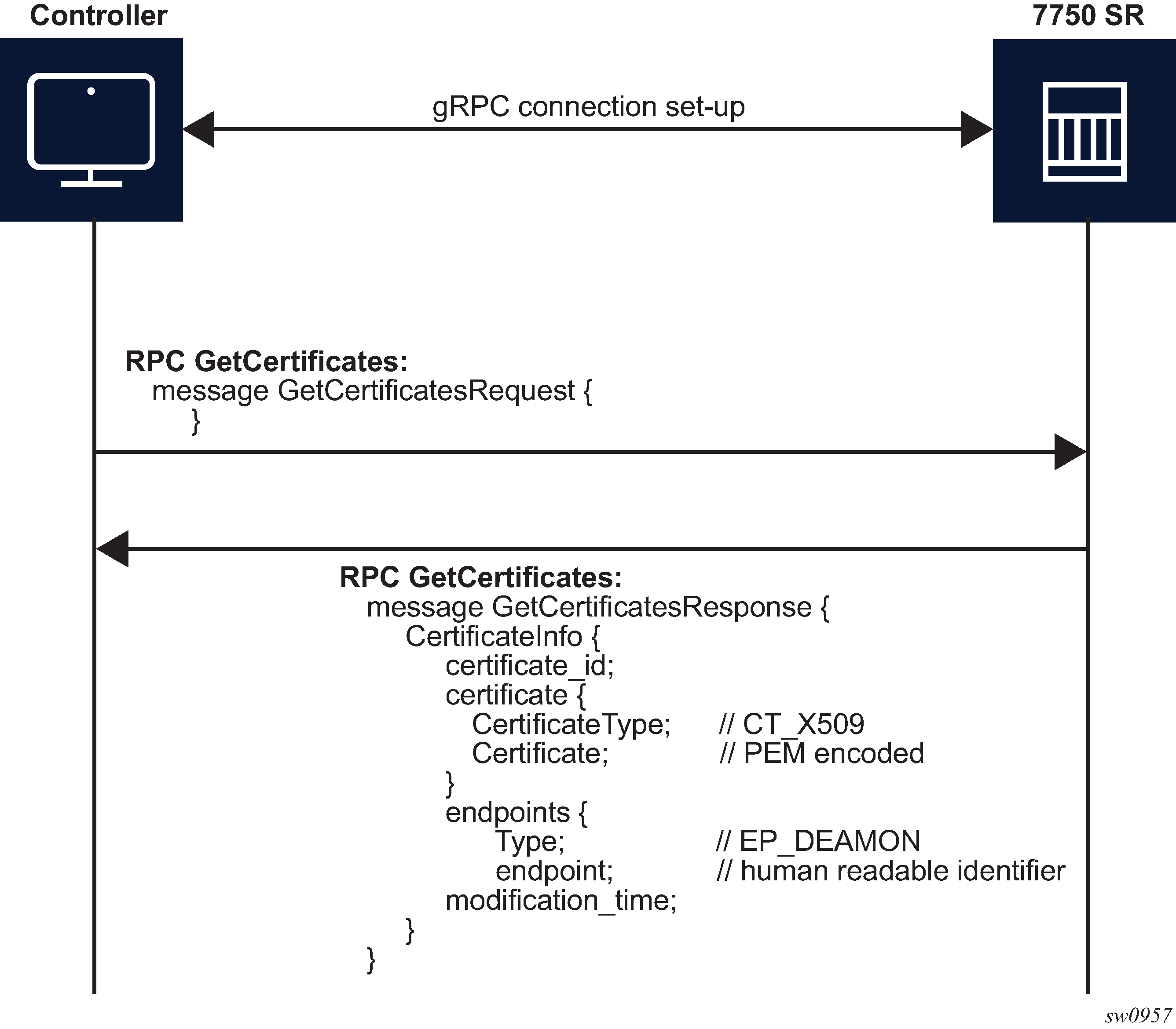
The RPC GetCertificates messages include a GetCertificateRequest and a GetCertificateResponse message. The GetCertificatesResponse message shown in the preceding figure includes the following information:
certificate_id
The SR OS uses a certificate filename as the certificate ID.
CertificateType
This is always set to X509 because it is the only type that the SR OS supports.
endpoint
Indicates the CERT profiles in the SR OS node that use this certificate; if multiple CERT profiles use the certificate, the names are concatenated with the separation character ‟/”.
RPC CanGenerateCSR
The RPC CanGenerateCSR message can be used to determine whether the gRPC server (SR OS node) can generate a Certificate Signing Request (CSR). It is a simple request and response operation, as shown in the following figure.
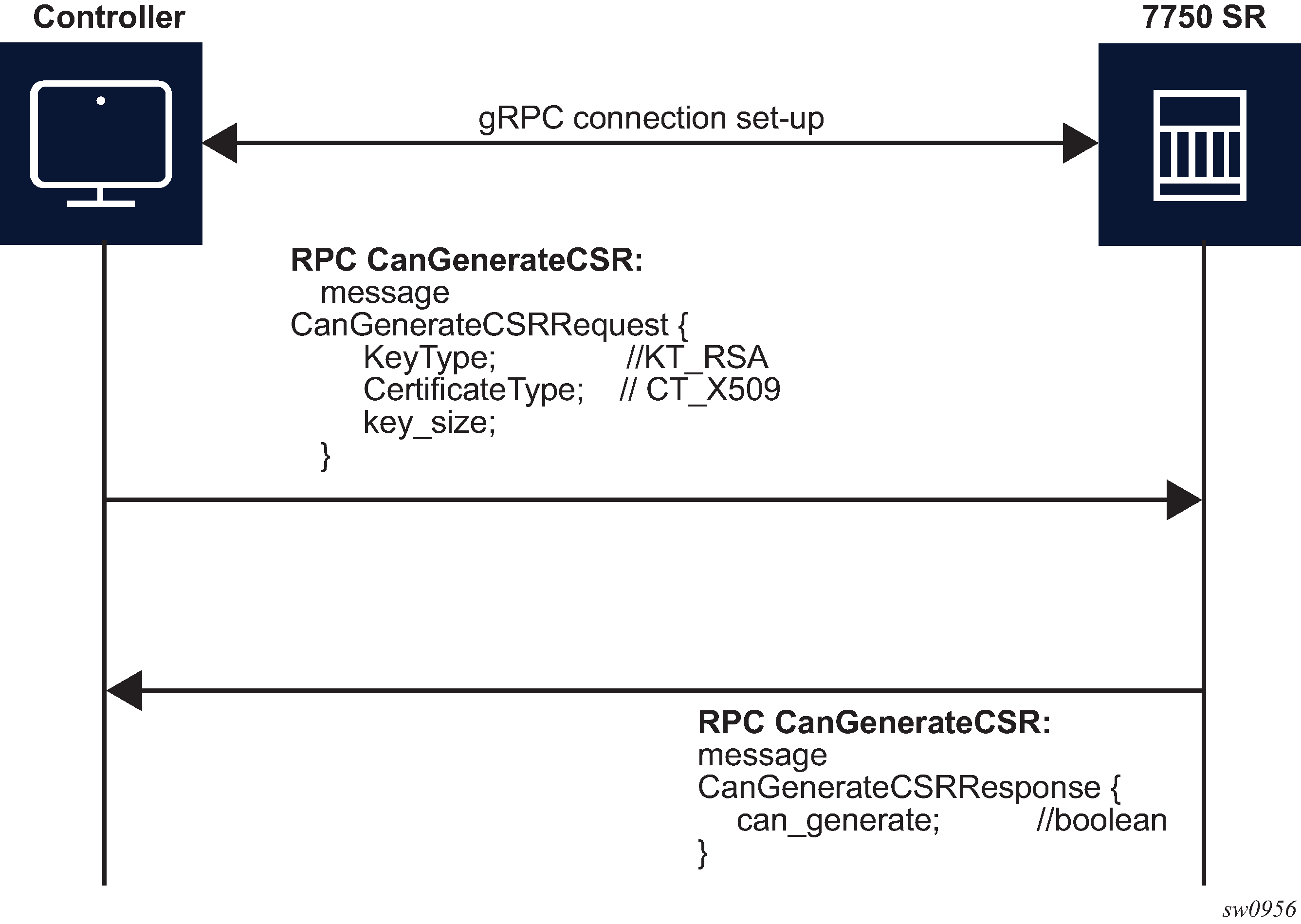
The SR OS supports only RSA keys and X509 certificates, so it responds positively only when those values are present in the respective fields. The key size must be between 512 and 8192. In all other cases, the SR OS responds negatively to the CanGenerateCSRRequest message.
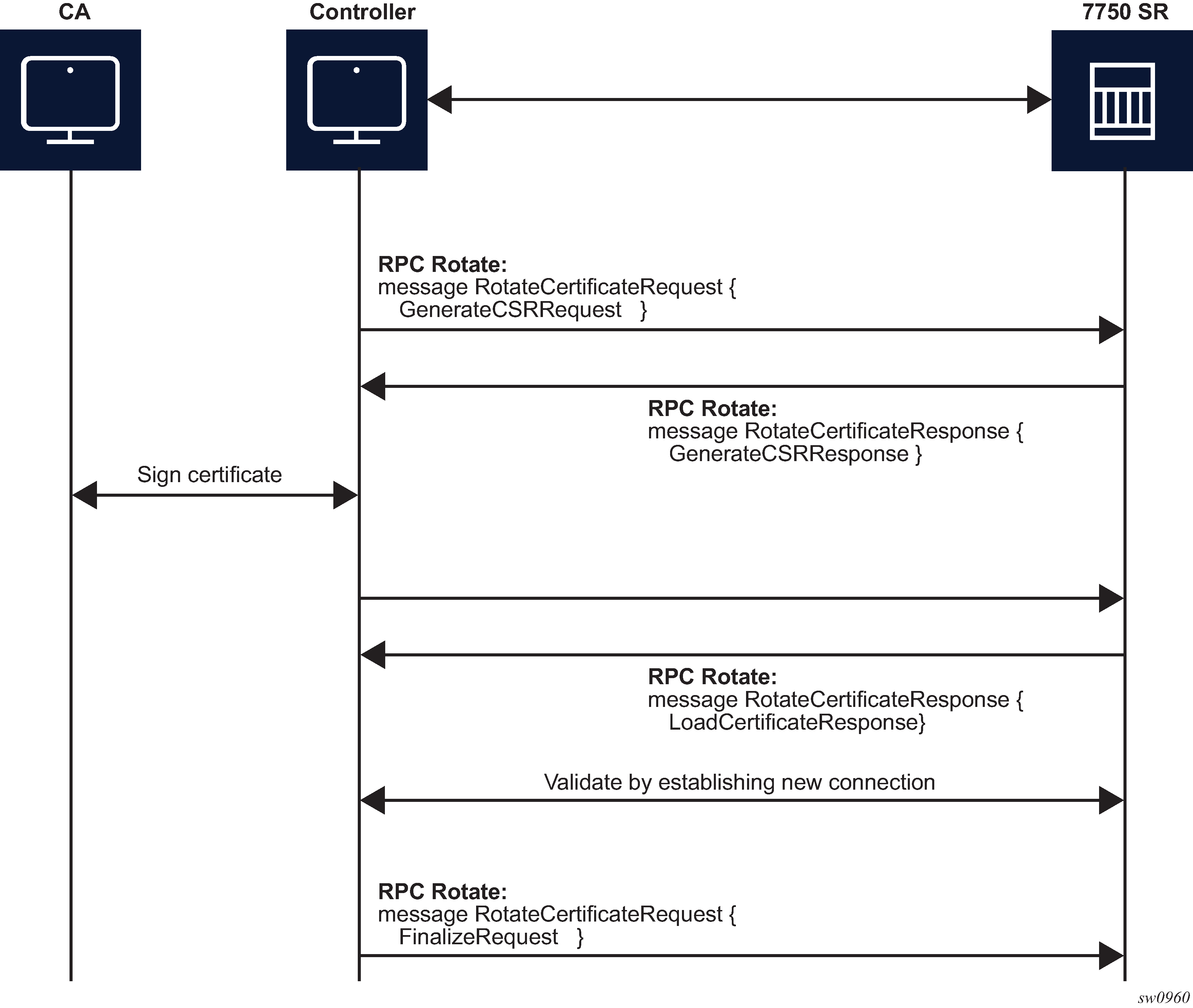
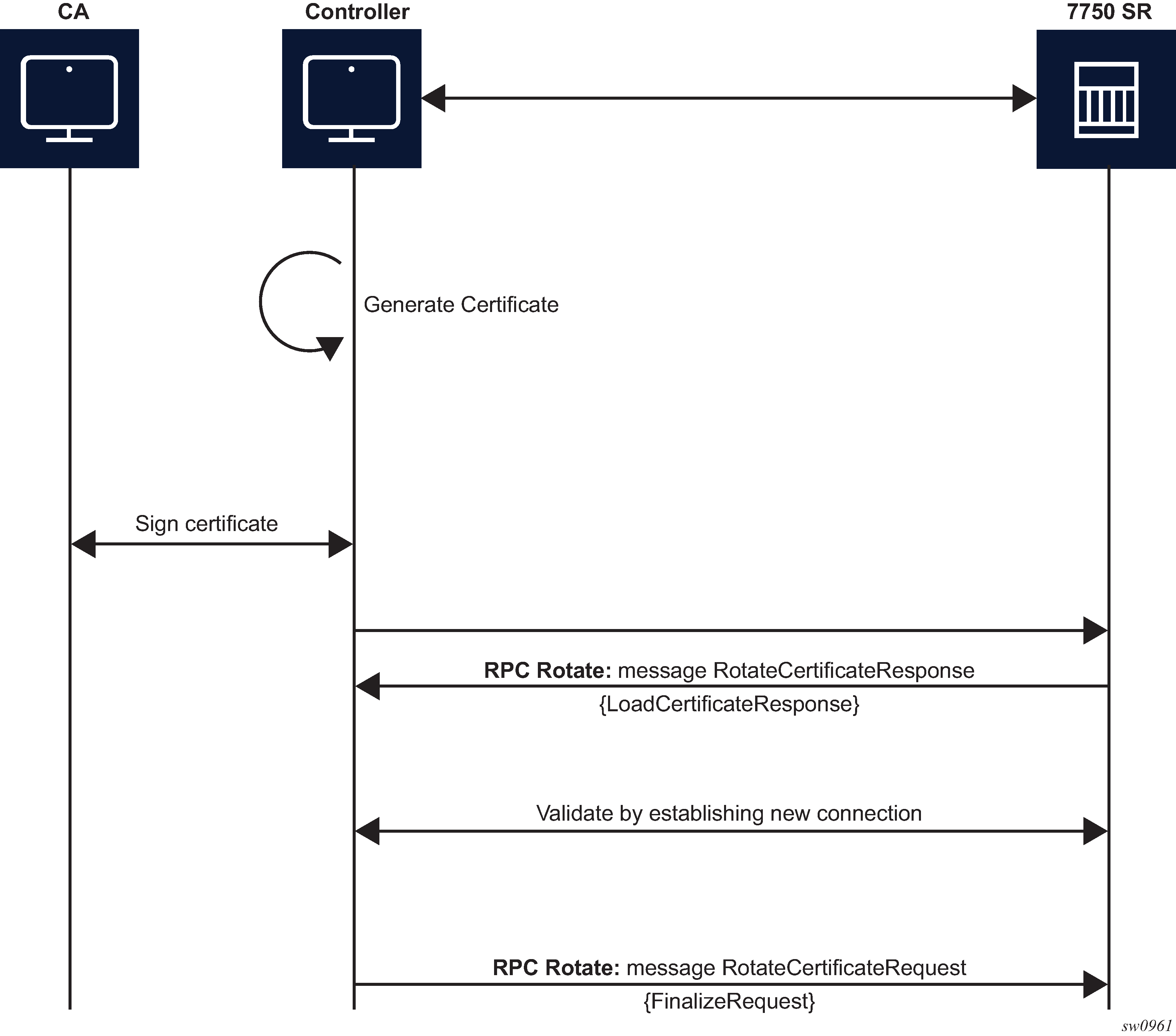
RPC Rotate
RPC Rotate allows the controller to rotate an active certificate on the server. After the rotation is completed, a new certificate can be used without affecting existing TLS connections.
The following cases are supported for a certificate rotation:
-
server capable of generating a CSR (see RPC Rotate message flow for CSRs generated on the SR OS node)
-
server not capable of generating a CSR (see RPC Rotate message flow when CSRs are not generated on the SR OS node)
The SR OS supports both scenarios, although it is assumed that in most cases the CSR is generated on SR OS node.
The following steps apply to both scenarios:
Generate the CSR.
Sign the CSR by the Certificate Authority (CA).
Load the new certificate on the server.
Verify the new certificate by creating a new connection.
Finalize by confirming that the new certificate is being used.
After the RPC Rotate is completed, all new connections use new keys.
From the perspective of the interaction of the controller and the server (SR OS) two stages are the most important:
message exchange to generate the CSR
message exchange to load the new certificates on the server
The following figure shows a detailed content of the messages that are exchanged for CSR generation. The SR OS accepts requests only for the X509 certificate type, RSA key type, and a minimum key length of 512 bits.
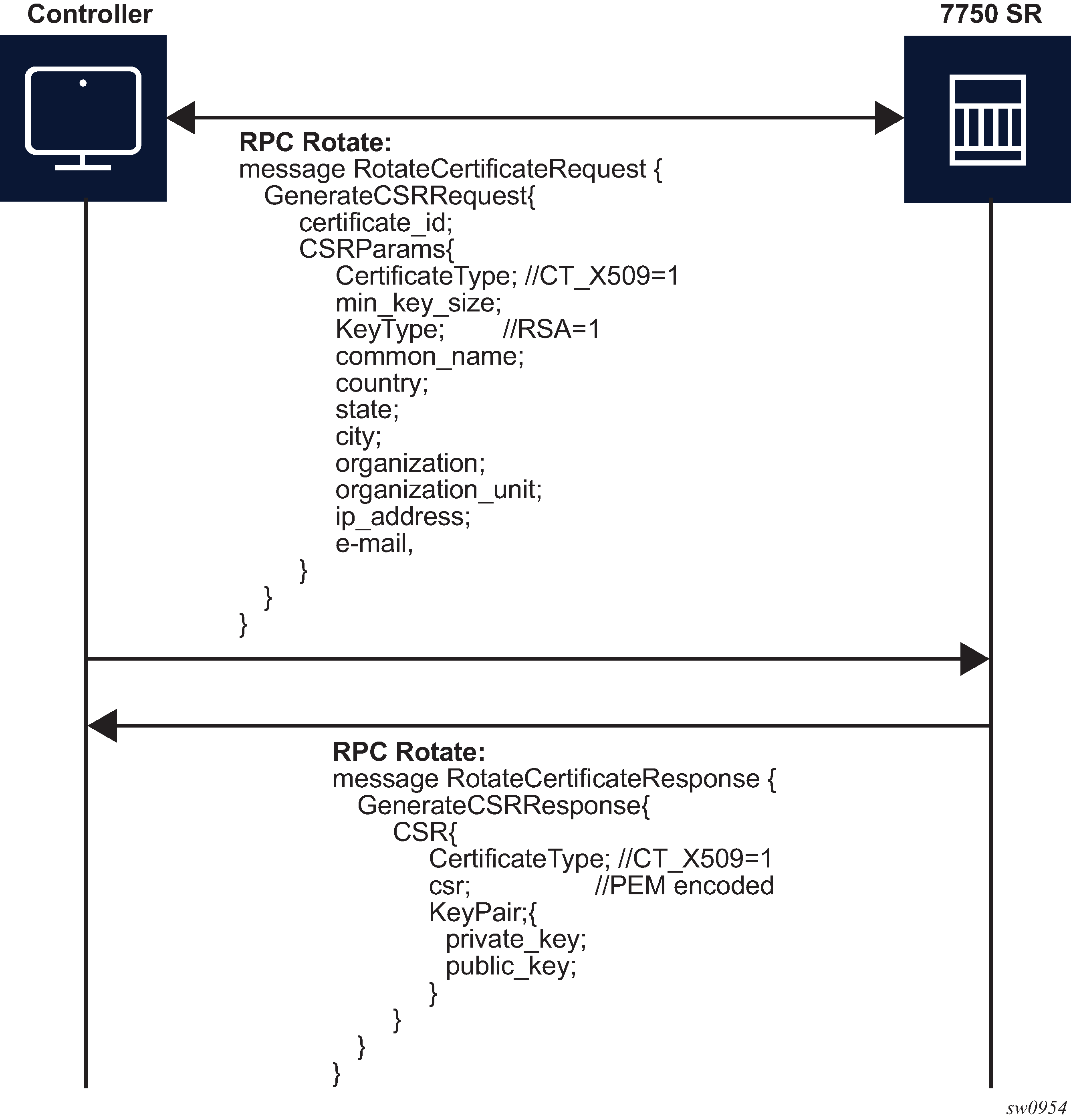
For RPC Rotate, the certificate_id points to an existing certificate on the node. All the other parameters in the GenerateCSRRequest message are not checked by the SR OS software explicitly. They are used by the internal API to generate the CSR and that result is transparently passed to the controller.
After the CA signs the certificates, the files are loaded to the server using LoadCSRRequest and LoadCSRResponse message exchange, as shown in the following figure. If this message exchange is used in the context of RPC Rotate, the certificate_id should not be present in LoadCSRRequest message. When the SR OS receives the message, it performs all the necessary steps to load this certificate, including storing the certificate and key files on the disk.
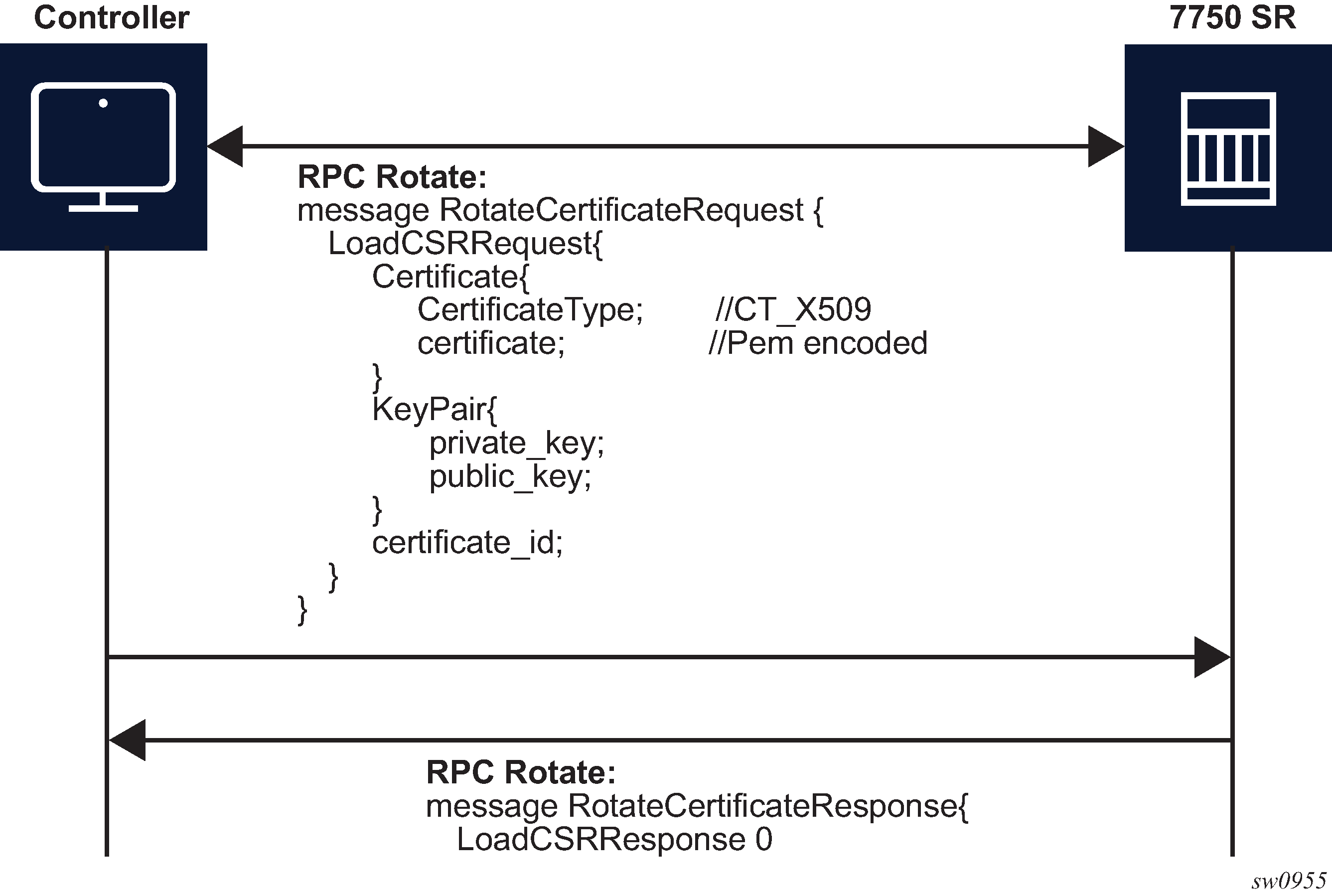
The controller is responsible for verifying the connection with the new certificate (Step 4 in RPC Rotate message flow for CSRs generated on the SR OS node and RPC Rotate message flow when CSRs are not generated on the SR OS node); SR OS treats this as an optional step.
After the whole RPC is successfully closed, the system can use the new certificate to start new TLS connections.
RPC Install
The controller can use RPC Install to install a new certificate on the server. After the certificate is installed, the server must be configured (assign a certificate and key files in the CERT profile) before the new certificate can be used.
The following two possible cases are supported for installing a certificate:
-
server capable of generating a CSR (see RPC install message flow for CSRs generated on the SR OS node)
-
server is not capable of generating a CSR (see RPC install message flow if CSRs are not generated on the SR OS node)
The SR OS supports both scenarios, although it is assumed that in most cases the CSR is generated on the SR OS node.
Both scenarios require the following steps:
Generate the CSR.
Sign the CSR by the Certificate Authority (CA).
Load the new certificate on the server.
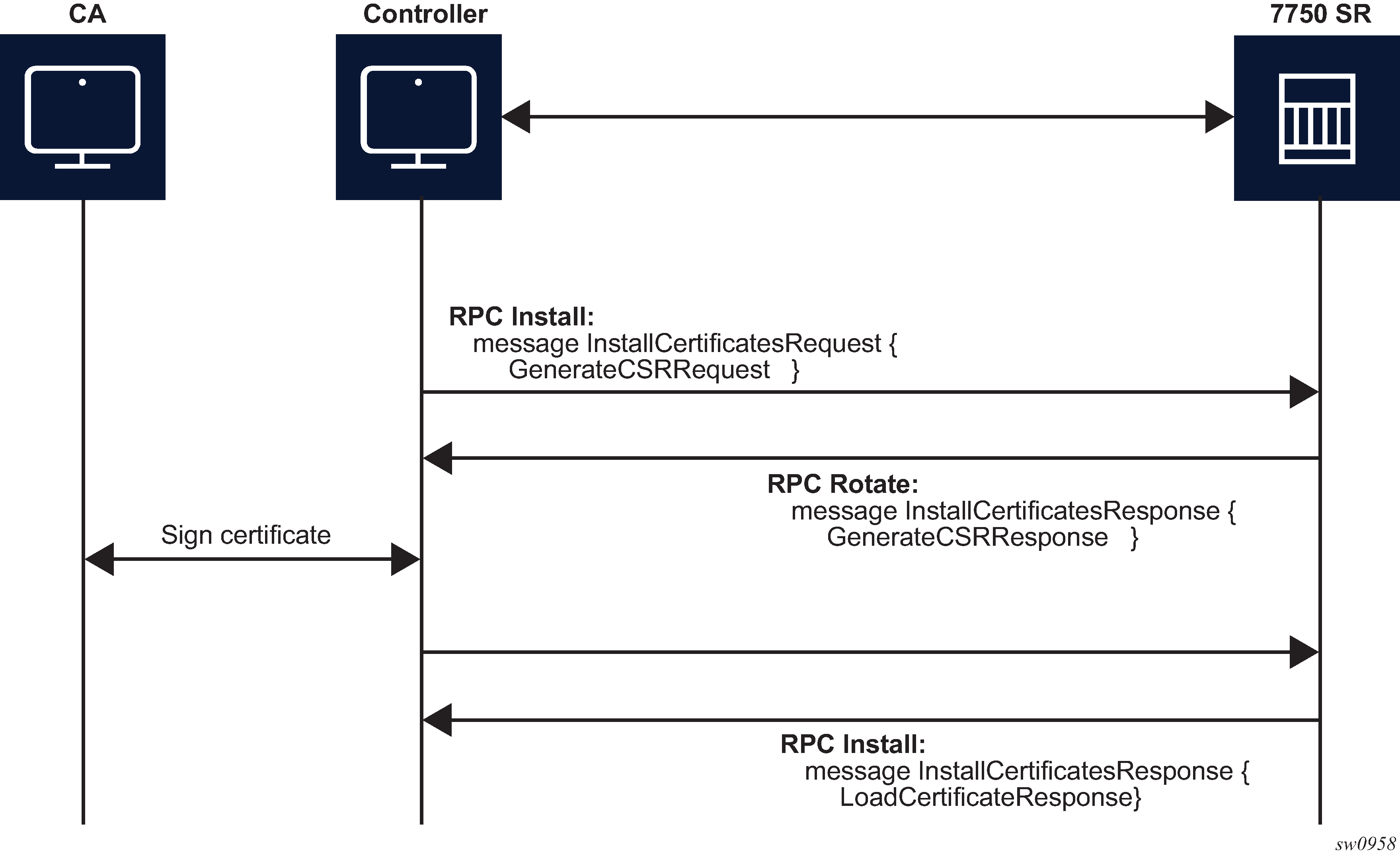
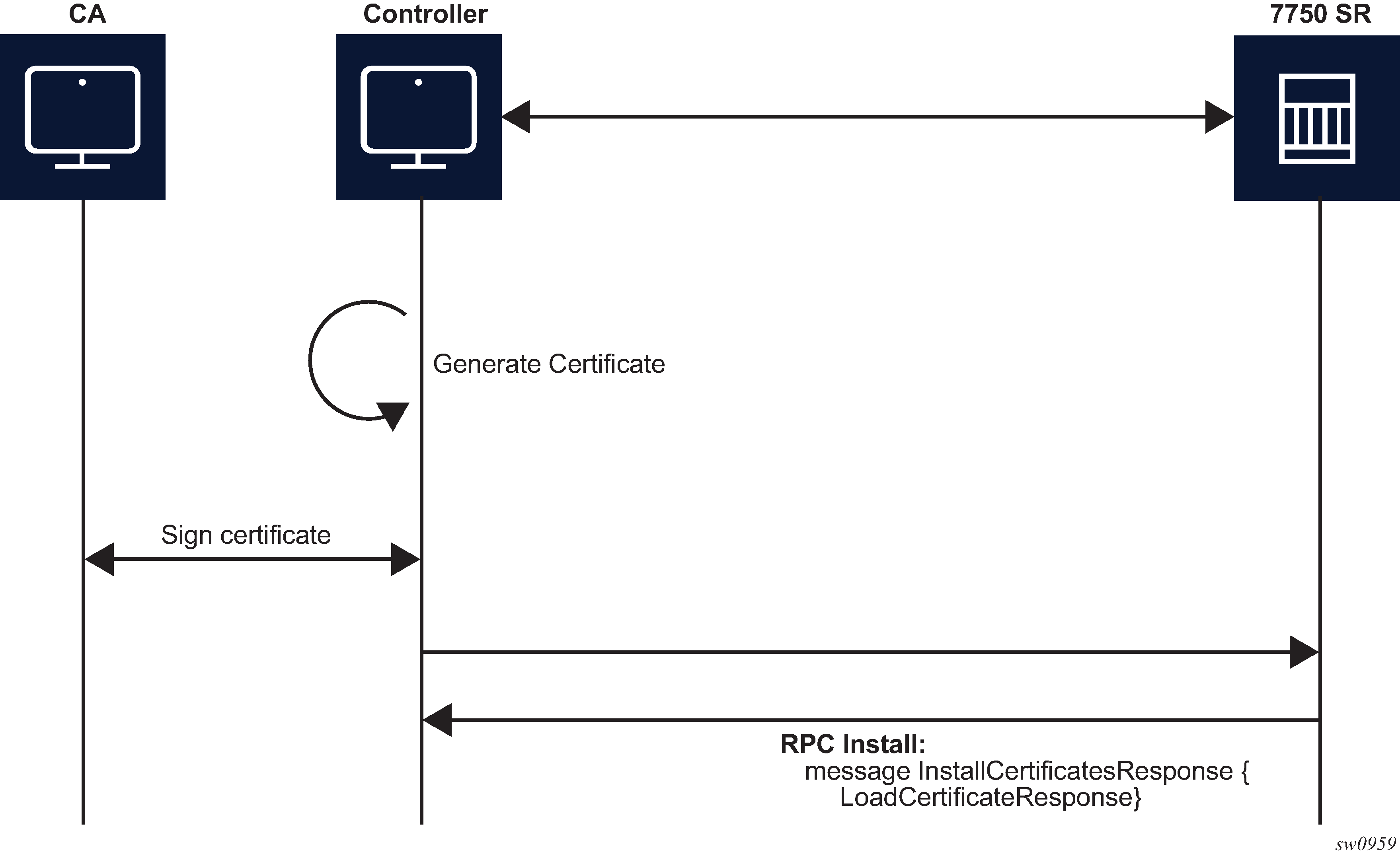
The message exchange during phases 1 and 3 is the same as shown in GenerateCSR message flow and LoadCSRRequest/Response message flow. The only difference, in the case of RPC Install, is that a new certificate_id is used.
After new certificates are installed, the system must be configured before it can be used. Configuration is supported using the following methods:
an existing gRPC session
a CLI session, SNMP, or NETCONF
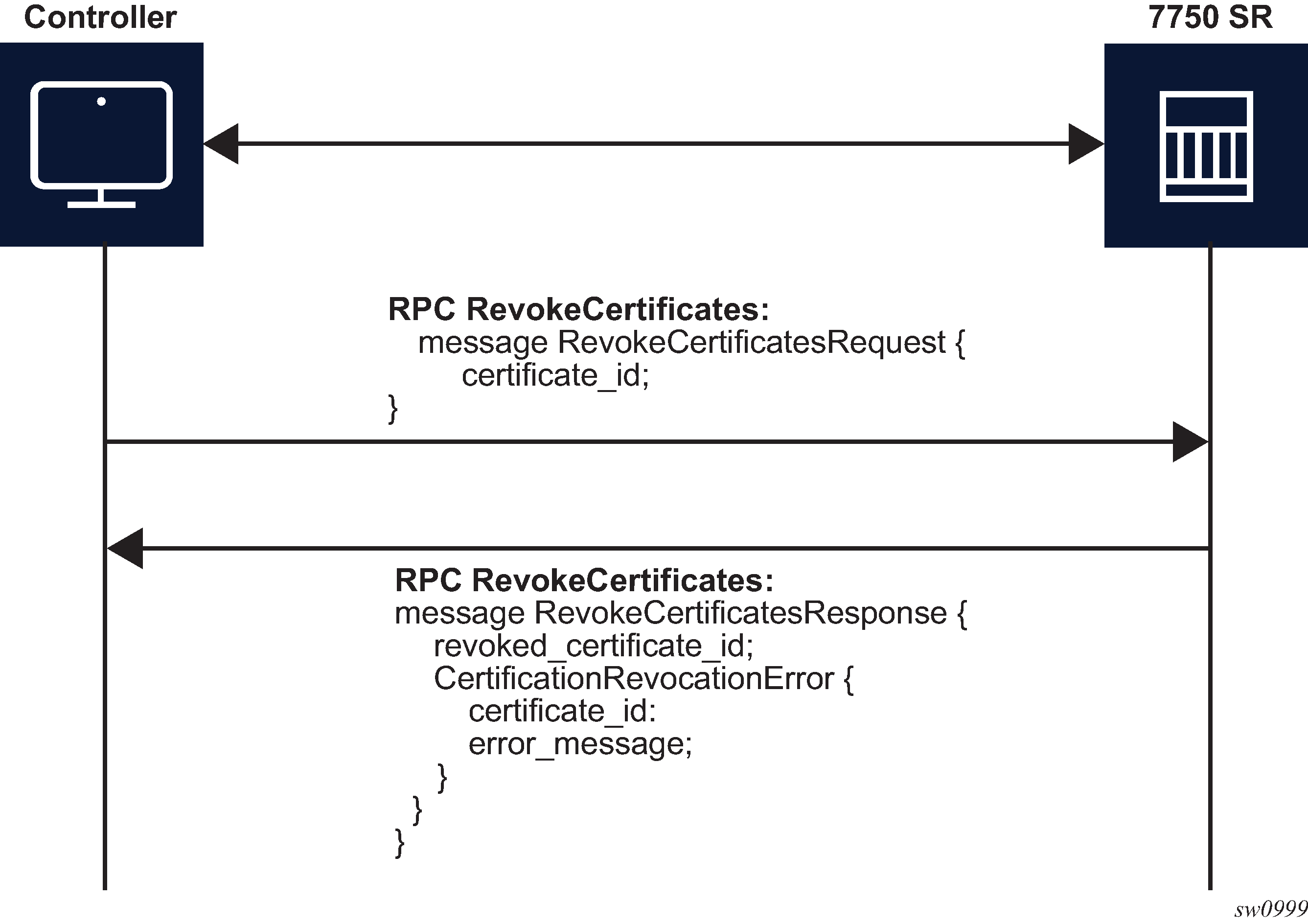
RPC RevokeCertificates
The purpose of the RPC RevokeCertificates is to make the existing certificate unusable by any client. In cases where the certificate being revoked by the client does not exist on the SR OS node, the corresponding RPC silently succeeds. The following figure shows the message flow.
gNOI System
In the gNOI System service, OpenConfig defines a generic interface that performs operational tasks on target network nodes. The specification can be found at following link: https://github.com/openconfig/gnoi/blob/master/system/system.proto.
These operations can be performed on individual targets, regardless of vendor. SR OS supports the following gNOI system RPCs:
SetPackage RPC
Reboot RPC
CancelReboot RPC
RebootStatus RPC
SwitchControlProcessor RPC
Ping RPC
Time RPC
Traceroute RPC
SetPackage RPC
The SetPackage RPC allows the controller to place a software package on the target node. The file transfer is protected by the checksum. SR OS supports options where the controller can directly stream files to the target node. The remote download option is not supported.
The controller can use the SetPackage RPC to modify the bof.cfg file when the package destination is different from the bootable image path configured in bof.cfg.
Reboot, CancelReboot, and RebootStatus RPC
The Reboot RPC allows the controller to reboot a target node. The RebootRequest message can be used to specify reboot delay and system actions that should be performed during the reboot. SR OS supports only cold reboot; that is, the entire node is shut down and restarted during the reboot process. A Reboot RPC can be used to reboot both IOMs and CPMs.
The CancelReboot RPC allows the controller to cancel pending reboots.
The RebootStatus RPC allows the controller to query the status of a reboot for an individual component specified in the RebootStatus request. SR OS supports querying on a single component at a time.
SwitchControlProcessor RPC
The SwitchControlProcessor RPC allows the switching of the active Control-Processor to the Control-Processor that is provided in the request message. Because SR OS supports two Control-Processors, one of the following paths must be provided in the request message, depending on which Control-Processor is currently in standby.
-
/state/cpm[cpm-slot=A]
-
/state/cpm[cpm-slot=B]
Ping RPC
The Ping RPC allows the controller to execute the ping command on the target node and results are streamed back to the source node.
Time RPC
The Time RPC returns the current time on the target node. This RPC is typically used to test for a response from the target.
Traceroute RPC
The Traceroute RPC allows the controller to execute the traceroute command on the target node and results are streamed back to the source node.
gNOI file
In the gNOI file service, OpenConfig defines a generic interface to perform file operational tasks. For information about the gNOI specification, see the following link: https://github.com/openconfig/gnoi/blob/master/file/file.proto.
SR OS supports the following gNOI file RPCs:
Get RPC
Put RPC
Stat RPC
Remove RPC
TransferToRemote RPC
Use the commands in the following context to configure authorization for each file RPC:
- MD-CLI
configure system security aaa local-profiles profile grpc rpc-authorization - classic
CLI
configure system security profile grpc rpc-authorization
Get RPC
A Get RPC reads and streams the contents of a file from a target location. The file is streamed using sequential messages and a final message containing the hash of the streamed data is sent before the stream is closed. An error is returned when:
the file does not exist
there is a problem reading the file
Put RPC
A Put RPC streams data to be written on a file on the target location. The file is streamed using sequential messages and a final message that includes the hash of the streamed data is sent prior to closing the stream. An error is returned when:
the location does not exist
an error is encountered while writing the data
Stat RPC
A Stat RPC returns metadata (that is, statistical information) about a file on the target location. An error is returned when:
the file does not exist
an error is encountered while accessing the metadata
Remove RPC
A Remove RPC removes the specified file from the target location. An error is returned when:
the file does not exist
there is a directory instead of a file
an error is encountered during the remove operation (for example, permission denied)
TransferToRemote RPC
A TransferToRemote RPC transfers the file from the target node to a specified remote location. When the file transfer is complete, the response contains the hash of the transferred data. An error is returned when:
the file does not exist
the file transfer fails
an error is encountered reading the file
MD-CLI service
The SR OS provides a proprietary management interface to use with the Network Interface Shell (NISH) tool which allows an MD-CLI style interface from a remote location to manage one or more SR OS nodes.
This feature is applicable only on SR OS platforms that support MD-CLI in Model-Driven or mixed configuration mode.
This service operates using gRPC and, therefore, the main gRPC service must also be enabled.
When enabled, the MD-CLI gRPC service provides MD-CLI schema information to the NISH client allowing users to remotely operate the SR OS device.
The MD-CLI gRPC service and the main gRPC service must be enabled on all nodes that will be managed using the NISH client.
Remote management using a remote NISH manager
When used together with the MD-CLI gRPC service, the remote management feature allows SR OS nodes to initiate communication with a remote NISH manager and announce their availability to be managed using the NISH client. This provides the NISH client with a dynamic view of the available nodes that it can manage.
The remote management service does not perform or enable the actual management of the SR OS node using NISH. This communication is achieved directly from the NISH client to the SR OS node using the MD-CLI gRPC service.
This feature is particularly useful when deploying clusters of SR OS nodes that may dynamically join or leave a cluster, such as in scenarios that use the Control and User Plane Separation (CUPS) BNG application with Virtualized Service Routers (VSRs).
A working NISH manager service is required on an external server to use the remote management feature. However, in the absence of a working NISH manager, the system will not stop remote management from being enabled within SR OS, nor will it stop the SR OS node from announcing its presence to the configured IP address or addresses of the NISH manager.
When a remote NISH manager is configured, the SR OS node initiates a gRPC session with the configured manager. The SR OS node sends a message to communicate its name, IP address (IPv4 and IPv6 are supported), and gRPC port to the NISH manager. The NISH manager responds with an acknowledgment message. The SR OS node periodically checks in with the NISH manager.
The following figure shows the remote management initiation.
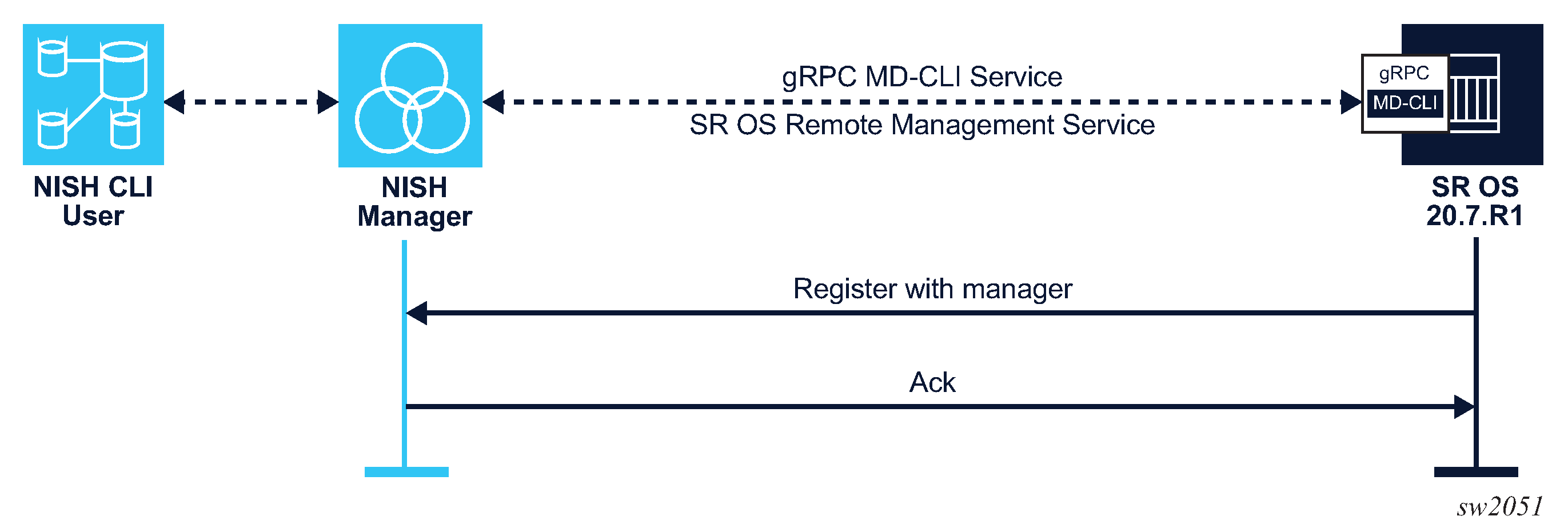
If the connection is interrupted, the SR OS node immediately attempts reconnection with the configured NISH manager.